cohesion model liquidbridge/general
Syntax
cohesion liquidbridge/general [other model_type/model_name pairs as described here ] settings keyword values
two mandatory keyword/value pairs need to be appended after the keyword settings (after all models are specified)
normal_model values = 'adams_perchard' or 'pitois' or 'washino' or 'washino_powerlaw' tangential_model values = 'goldman' or 'xu' or 'washino' or 'xu_powerlaw'
zero or more keyword/value pairs may be appended after the keyword settings (after all models are specified)
limitLiquidContent values = 'on' or 'off' on = enables the model parameter maxLiquidContent off = standard implementation without a limiter for the per particle liquid content modifyLbVolume values = 'on' or 'off' on = enables the model parameter lbVolumeFraction off = standard implementation with lbVolumeFraction = 0.05
Associated material properties
Material properties
contactAngle( ): contact angle between particle’s material and liquid [deg]
): contact angle between particle’s material and liquid [deg]maxLiquidContent( ): maximum liquid content of a particle of this material. It is expressed
as fraction of the particle’s volume [
): maximum liquid content of a particle of this material. It is expressed
as fraction of the particle’s volume [![\cdot; [0, 1]](_images/math/d1d7aa09cf0c07f144337cc6b69d71eeddbaa933.png) ] (required only if limitLiquidContent on)
] (required only if limitLiquidContent on)minLiquidLayerThickness: the minimal thickness of the liquid film (default: 0)
Global scalars
minRelativeSeparationDistance( ): ratio between the minimum distance between particles’ surface
and the effective radius
): ratio between the minimum distance between particles’ surface
and the effective radius  . For surface separations below this value, the liquid bridge model assumes
a distance equal to
. For surface separations below this value, the liquid bridge model assumes
a distance equal to  [
[![\cdot; ]0, \cdot]](_images/math/85adbb720461bac8a63de8a9d02bec3d408adb26.png) ]
]maxRelativeSeparationDistance( ): ratio between the maximum distance between particles’ surface
and the effective radius at which the liquid bridge can exists []
): ratio between the maximum distance between particles’ surface
and the effective radius at which the liquid bridge can exists []surfaceLiquidContentInitial( ): particle initial liquid content. It is expressed
as fraction of the particle’s volume []
): particle initial liquid content. It is expressed
as fraction of the particle’s volume []fluidViscosity(
 ) dynamic viscosity of the liquid if
) dynamic viscosity of the liquid if fluidPowerLawExponentnot given or equal to one (fluid is considered Newtonian) [pressure*time;![[0,\cdot]](_images/math/c3ade1266bdcbe439dc16bc12079e6e520a715c4.png) ]
](
 ) flow consistency of the liquid if
) flow consistency of the liquid if fluidPowerLawExponentis [pressure*time^n;
[pressure*time^n; ![[0, \cdot]](_images/math/992f8c4cb42bf1dd5c9c9f5e7523c95b0c81ece6.png) ]
]
surfaceTension( ): surface tension of the liquid [force/length; ]
): surface tension of the liquid [force/length; ]lbVolumeFraction( ): liquid amount forming the liquid bridge. It is expressed as fraction of the total liquid contained by the two particles forming the bridge [] (required only if modifyLbVolume on)
): liquid amount forming the liquid bridge. It is expressed as fraction of the total liquid contained by the two particles forming the bridge [] (required only if modifyLbVolume on)fluidPowerLawExponent( ): power index [
): power index [![\cdot; [0, \cdot]](_images/math/20e0486df4a5d72544edffb5d5a6dbc045b17df6.png) ]
]liquidRedistributionFactor: ( ) multiplicative factor for particle redistribution upon bridge breaking (default: 1) [
) multiplicative factor for particle redistribution upon bridge breaking (default: 1) [![- ; [0,1]](_images/math/91350c97a022a773c9f70e4cf785078f9f703adb.png) ]
]
Description
This model adds viscous and capillary forces due to a liquid bridge between two
particles. When two particles are close enough, a bridge is formed, which
breaks again once the particles are separated. When the bridge breaks, it is
assumed that the surface liquid volume distributes evenly to the two particles
by default. This behavior can be adjusted by setting the material property
liquidRedistributionFactor (). The liquid forming the bridge is
distributed according to the area ratio of the particles involved in the
contact where each area is adjusted by this property, i.e. the ratio is given
as:
and the volume weight is then
Different force models for normal and tangential interaction via Newtonian or power-law fluids can be chosen.
The model parameter maxLiquidContent allows to limit the maximum liquid content per-particle (enabled by the keyword limitLiquidContent). In case this feature is enabled, the maxRelativeSeparationDistance will be overwritten to allow the maximum volume to be achieved. The model parameter surfaceLiquidContentInitial is the initial liquid content of the particles as fraction of their volume.
If this contact model is used for mesh walls, they will need to have an associated mesh module liquidtransfer.
If modifyLbVolume on, it is possible to define the amount of liquid that forms each liquid bridge via the model parameter lbVolumeFraction. For modifyLbVolume off, lbVolumeFraction is set by default to 0.05.
The minimum and maximum separation distance ratios control the distance
range in which the model is active. Liquid bridges are always considered
to rupture at a distance of  . The value for
minRelativeSeparationDistance is used to avoid divergence of the force
models. For surface separations below this value, the distance is
assumed to be
. The value for
minRelativeSeparationDistance is used to avoid divergence of the force
models. For surface separations below this value, the distance is
assumed to be  .
.
Force computation
The normal models adams_perchard, pitois and washino are all Newtonian models for interstitial fluids and are described in Washino et al. [1]. Adams-Perchard is a pure lubrication model that does not take into account the finite size of a liquid bridge, while the Pitois and Washino model take the finite extent of the liquid bridge into account. The normal model washino_powerlaw from Washino et al. [3] computes the normal force due to a liquid bridge formed by a power-law fluid.
The tangential models goldman, xu and washino, described in Washino et al. [2], consider Newtonian fluids. Again, the Goldman model is actually a lubrication model that does not take into account the finite size of a liquid bridge, while the Xu and Washino models consider a finite liquid bridge. The xu_powerlaw model computes the tangential force for a liquid bridge formed by a power-law fluid, see Xu et al. [4]. For the Xu model, the force only depends on the tangential relative velocity, while the Goldman and Washino models additionally compute a force/torque due to relative angular velocity of the particles.
The models for Newtonian fluids can be combined freely. The power-law models require each other. Please beware when using power-law models, a lower timestep might be required to discretize the non-linear behavior.
In a power-law fluid, the viscosity is given by

where is the flow consistency (set via fluidViscosity),
 is the shear rate, and is the power
index of the fluid, set via
is the shear rate, and is the power
index of the fluid, set via fluidPowerLawExponent
In addition to the viscous force models, a capillary force as in Rabinovich et al. acts between the particles.
In the following, detailed description of the force computation, the following quantities are used:
symbol |
meaning |
|---|---|
|
radius of particle |
|
minimal width of gap between particles |
|
volume of the liquid bridge |
|
width of the liquid bridge at particle surface |
|
width of gap between particles at liquid bridge width |





Forces are computed in dimensionless form, thus the following quantities are introduced:
name |
equation |
|---|---|
effective radius |
|
reduced surface separation |
|
reduced liquid bridge volume |
|
reduced liquid bridge width |
|
reduced gap width at |
|






Normal Models
All equations for normal forces for Newtonian fluids are taken from Washino et al. [1]. All three normal force models follow the scheme
with
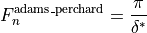
for the adams_perchard model,
for the pitois model , and
![\begin{align*}
A & = 0.72 \delta^{*4} + 1.8 \delta^{*3} \\
B & = -\delta^{*4} + 2.5 \delta^{*3} - 2.4 \delta^{*2} \\
F_n^{\mathrm{washino}} & = \frac{\pi}{\delta^*}
\left[
\left( 1-\frac{\delta^*}{H^*} \right)^2
+ \frac{A}{\delta^*} \left( \frac{1}{\delta^*} - \frac{1}{H^*} \right)
+ \frac{B}{\delta^*} \left( H^* - \delta^* \right)
\right]
\end{align*}](_images/math/5ca0622aae68d3d5bac21fe9070b0ccabb858265.png)
for the washino model.
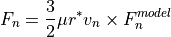
The washino_powerlaw model (Washino et al. [3]) computes the normal force for a liquid bridge formed by a power-law fluid. The model is based on work by Lian et al. [6] and Xu et al. [4]. According to Xu et al., this force can be expressed as
![\begin{align*}
R_{lb} & = \left[ -2 r^* \delta
+ 2 \left( r^{*2} \delta^2 + \frac{r^* V_{lb}}{\pi} \right)^{1/2} \right]^{1/2} \\
c & = \frac{R_{lb}^2}{2 r^* \delta} \\
F_n & = 2 \pi \left( \frac{2n+1}{n} \right)^n
\frac{R_{lb}^{n+3}}{\delta^{2n+1}} K (v_n)^n \times f_n(n, c) \\
\end{align*}](_images/math/db233495e682420c41aaf5b5457336855f1a52f1.png)
with  the dimensionless normal force. According to
Lian et al. [6], this dimensionless force can be
expressed as
the dimensionless normal force. According to
Lian et al. [6], this dimensionless force can be
expressed as
![\begin{align*}
f_{Lian} (n, c) & = \left( \frac{1}{2c} \right)^{(n+3)/2} \left[ f_1(n) + f_2(n, c) \right] \\
f_1(n) & \approx 3 \exp{(-2.40 n)} + 1.5 \exp{(-1.06n)} \\
f_2 (n, c) & =
\begin{cases}
2^{5/3} \left[ \ln{ \left( \frac{\left(2c\right)^{1/2}}{4} \right) }
+ \frac{5}{3} \left( \frac{1}{2c} \frac{1}{16} \right) \right] & n = 1/3 \\
2^{2n+1}
\left[
\frac{\left(2c\right)^{(1-3n)/2} - 4^{1-3n}}{1-3n}
+ \frac{4n+2}{3n+1}
\left(
\frac{1}{\left(2c\right)^{(1+3n)/2}} - \frac{1}{4^{1+3n}}
\right)
\right] & n \neq 1/3
\end{cases}
\end{align*}](_images/math/d466bd780db9287a1f2e9708d07445c336ebb767.png)
This model yields good results for  , but diverges for
, but diverges for
 . Thus, Washino et al. [3]
added the following correction:
. Thus, Washino et al. [3]
added the following correction:
![\begin{align*}
N & =
\begin{cases}
2n+1 & \text{for } n < 1/3 \\
\frac{n+3}{2} & \text{for } n \geq 1/3
\end{cases} \\
\Omega & =
\frac{\left[ \frac{1}{(n+3) f_{Lian}(n,c)} \right]^{1/N} - 1}{8} \\
f_{washino\_powerlaw} (n,c) & =
\begin{cases}
\frac{1}{n+3} \left( \frac{1}{1 + \Omega c} \right)^N & \text{for } c < 8 \\
f_{Lian}(n,c) & \text{for } c \geq 8
\end{cases}
\end{align*}](_images/math/c6d18e64414b1605389c26624b78beaf7a289b5f.png)
Tangential Models
Force computation for tangential forces is split up in translational and rotational components.
For Newtonian fluids, all equations are taken from Washino et al. [2]. The general form of the tangential force reads

with  being the relative tangential velocity, and
being the relative tangential velocity, and
 the relative angular velocity of the two particles. The
force equations for the individual models are listed below:
the relative angular velocity of the two particles. The
force equations for the individual models are listed below:
For the goldman model, the force equations read
In the xu model, only translational tangential force is considered:
![\begin{align*}
\lambda & = 2 r^* / \max{(r_i, r_j)} \\
c & = \frac{B^2}{2 r^* \delta} \\
F_{tr}^{Xu} & = \frac{2 + 3 \lambda}{15} \ln{\left(1+c\right)}
+ \frac{ \left(\ \lambda-1 \right) \left(\ \lambda-2 \right)}{5}
\left[ \ln{\left(1+c\right)} - \frac{1}{1+c} \right] \\
F_{rot}^{Xu} & = 0 \\
\end{align*}](_images/math/08c679ce942acbec31dc35bb9d01937516a1b0a1.png)
Note: the  in the Xu model is not the same as
in the normal Washino model!
in the Xu model is not the same as
in the normal Washino model!
The washino model can be expressed as
![\begin{align*}
\gamma & = 0.076 \\
A_T & =
\left[
\frac{\lambda-1}{10}
+ \left( \frac{\lambda-1}{8} - \frac{\lambda-1}{10} \right) \exp{\left( -\gamma c \right)}
\right] \frac{1}{1+c} \\
A_R & =
\left[
\frac{1}{10}
+ \left( \frac{-1}{8} - \frac{-1}{10} \right) \exp{\left( -\gamma c \right)}
\right] \frac{1}{1+c} \\
F_{tr}^{Washino} & = 4 A_T c \left( 1-\lambda \right)
+ \left[
2 A_T c \left( \lambda-1 \right) + 4 A_T \left( \lambda-1 \right) + \frac{1}{3}
\right] \ln{\left(1+c\right)} \\
\end{align*}](_images/math/b5bcce748d18a035c861c02a19c4d26d85e8819a.png)
![F_{rot}^{Washino} & = 4 A_R c \left( 1-\lambda \right)
+ \left[
2 A_R c \left( \lambda-1 \right) + 4 A_R \left( \lambda-1 \right) + \frac{1}{3}
\right] \ln{\left(1+c\right)} \\](_images/math/7a40134cc7d0113d880e3ecaec230500eb0232b5.png)
In the xu_powerlaw model, the tangential force is expressed as

with the dimensionless force
![f_{tr}^{xu\_powerlaw} =
\frac{n^2 + 3n + 3 \lambda - 2}{c(n-1)(n^2+3n+1)}
\left[ 1 - \frac{1}{(1+c)^n} \right]
+
\frac{3 (\lambda-1) (n \lambda - n - 1)}{cn (n-1) (n^2 + 3n + 1)}
\left[ 1 - \frac{1 + cn}{(1+c)^n} \right]](_images/math/80ad2d2f917e446215937c4bca088c78a3bcefa4.png)
with  as above in the xu tangential model and
as above in the xu tangential model and
 as defined in the washino_powerlaw normal model.
as defined in the washino_powerlaw normal model.
Just as in the xu model for Newtonian fluids, no rotational tangential force is considered in the xu_powerlaw model.
Capillary force
In addition to the models chosen by the user, a capillary force as in Rabinovich et al. acts between the particles. This force can be expressed as
![\begin{align*}
C & = \left[ -1 + \sqrt{ 1 + 2 V_{lb} / \pi r^* \delta^2} \right] \\
d \left(\delta, V_{lb} \right) & = \frac{\delta}{2} C \\
\alpha & = \sin \left( \frac{\delta}{r^*} C \right) \\
F \left( \delta, V_{lb} \right) & =
\frac{2 \pi r^* \gamma^* \cos \sigma}{1 + \left( \delta / 2 d \left(\delta, V_{lb} \right) \right)}
- 2 \pi r^* \sin \alpha \sin \left(\sigma+\alpha\right) \\
\end{align*}](_images/math/b9c2b34072c2378b780eb2a6cdd84059e5d03d69.png)
where is the surface tension of the fluid.
 is used as effective contact
angle, where
is used as effective contact
angle, where  are the individual contact angle
values for particles
are the individual contact angle
values for particles  ,
,  .
.
Liquid transport
By default, this model automatically instantiates a scalar transport
equation that solves for the surface liquid content of each particles,
expressed in volume percentage of solid volume, i.e.,  .
The surface liquid volume is assumed to be small, i.e. it is assumed to
have no effect on the particle mass, diameter and density.
.
The surface liquid volume is assumed to be small, i.e. it is assumed to
have no effect on the particle mass, diameter and density.
The user can override the default behavior by explicitly specifying a fix that solves for the surface liquid transport between particles. Such fixes are fix liquidtransport/porous or fix liquidtransport/sponge
Minimum thickness of liquid film
If minLiquidLayerThickness is set to a value larger than 0, the liquid film covers
the particle completely only if the resulting liquid film thickness is larger than
the value set for minLiquidLayerThickness. Otherwise the particle is covered only
partially by a liquid film of the minimal thickness. The extent of the patch depends
on the liquid volume stored on the particle.
In case of a partial liquid coverage the liquid bridge model is not invoked if the dry sections of two particles or the dry section of the particle collide. If a “dry” collision without or a “wet” collision with liquid bridge occurs is determined stochastically for each collision event based on the ratio of wetted and dry surface area of the particles.
This additional modelling setup will be skipped if the material definitions of
both involved collision partners have set minLiquidLayerThickness 0.
Note
Stochastic nature of collisions, as mentioned above, means that to some extent the deterministic nature of the simulation is lost! E.g. the number of particles will change their behaviour, or the number of cores will also change behaviour!
Output
This model stores a couple of per-particle properties, for access by various output commands.
You can access the property surfaceLiquidContent by f_surfaceLiquidContent (units % of solid particle volume), liquidFlux (units % of solid particle volume/time) by accessing f_liquidFlux and liquidSource (units % of solid particle volume/time) by accessing f_liquidSource. The latter can be used to manually set a surface liquid source via the set command.
Currently, there is a restriction that these properties can only be accessed after a run 0 command.
Restrictions
Coarse-graining information:
Using coarsegraining in combination with this command might lead to different dynamics or system state and thus to inconsistencies.
Default
lbVolumeFraction = 0.05, limitLiquidContent = ‘off’
Literature
[1] Washino et al., J. Colloid Interface Sci. 494 (2017) 255-265
[2] Washino et al., Chem. Eng. Sci. 174 (2017) 365-373
[3] Washino et al., Chem. Eng. Res. Des. 312 (2018) 1030-1036
[4] Xu et al., China Particulogy Vol. 3 Nos. 1-2, 52-57, 2005
[5] Rabinovich et al., Langmuir 2005, 21, 10992-10997
[6] Lian et al., J Nonnewton Fluid Mech 100 (2001) 151-164