cohesion model bondRelative
Purpose
Implementing the bond model from Potyondy and Cundall with adaptations for growing or shrinking particles.
Syntax
cohesion bondRelative [other model_type/model_name pairs as described here ] settings keyword values
zero or more keyword/value pairs may be appended after the keyword settings (after all models are specified)
stressBreak values = 'on' or 'off' on = bond will break by exceeding maximum stresses off = no effect due to stress plasticDissipation values = 'on' or 'off' on = plastic dissipation model is enabled off = plastic dissipation model is disabled
Associated material properties
Material properties
bondYm( ): Young’s modulus of the bond material [pressure]
): Young’s modulus of the bond material [pressure]bondPoissonsRatio( ): Poisson’s ratio of the bond material [
): Poisson’s ratio of the bond material [ ]
]bondRelativeYieldStressPlasticDissipation( ): plastic yield stress of the bond material [pressure] (required only if plasticDissipation on)
): plastic yield stress of the bond material [pressure] (required only if plasticDissipation on)bondRelativeBetaPlasticDissipation( ): parameter that controls the saturation behaviour of the model [](required only if plasticDissipation on)
): parameter that controls the saturation behaviour of the model [](required only if plasticDissipation on)bondRelativeMaxEnergyDensityPlasticDissipation( ): maximum energy density dissipated by the bond [energy/length^3] (required only if plasticDissipation on)
): maximum energy density dissipated by the bond [energy/length^3] (required only if plasticDissipation on)
Material interaction properties
radiusMultiplierBond( ): coefficient which multiplies the minimum particle radius
between bonded particles to determine the radius of the cylindrical beam representing the bond []
): coefficient which multiplies the minimum particle radius
between bonded particles to determine the radius of the cylindrical beam representing the bond []bondNormalDampingRatio( ): ratio between the applied normal damping force and the critical
normal damping force []
): ratio between the applied normal damping force and the critical
normal damping force []bondTangentialDampingRatio( ): ratio between the applied tangential damping force and the critical
tangential damping force []
): ratio between the applied tangential damping force and the critical
tangential damping force []maxSigmaBond( ): maximum normal stress of the bond [pressure] (required only if stressBreak on)
): maximum normal stress of the bond [pressure] (required only if stressBreak on)maxTauBond( ): maximum tangential stress of the bond [pressure] (required only if stressBreak on)
): maximum tangential stress of the bond [pressure] (required only if stressBreak on)
Global scalars
tsCreateBond( ): time-step number at which the bonds can be created []
): time-step number at which the bonds can be created []
Description
This model can be used as part of pair gran and fix wall/gran
This bond model implements the parallel bond model from Potyondy and Cundall , with adaptations for growing or shrinking.
The current implementation creates the bond with zero forces and torques between
the bonded particles. Due to relative motion forces and torques will act on the
particles, where the normal force  is calculated explicitly, while the
tangential force
is calculated explicitly, while the
tangential force  , the normal torque
, the normal torque  and the tangential
torque
and the tangential
torque  are calculated incrementally:
are calculated incrementally:
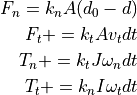
where  and
and  are the normal and tangential stiffness per unit
area of the bond,
are the normal and tangential stiffness per unit
area of the bond,  is the particles’ overlap,
is the particles’ overlap,  is the
relative tangential velocity at contact,
is the
relative tangential velocity at contact,  and
and  are the relative normal and tangential angular velocity at contact. The
cross-sectional area
are the relative normal and tangential angular velocity at contact. The
cross-sectional area  , the polar moment of inertia
, the polar moment of inertia  and
the moment of inertia
and
the moment of inertia  are defined as:
are defined as:
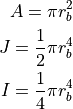
where the the beam radius is defined as  , i.e. the product of
the minimum radius of the bonded particles and the user-defined property radiusMultiplierBond.
With the default radiusMultiplierBond = 1 the beam that is located between two particles is a
cylinder with radius equal to the minimum radius of the two particles. The
radiusMultiplierBond allows to shrink (or grow) the beam that represents the
bond between these two particles. Clearly, a thicker beam will make the system
more stiff, while a thinner beam will decrease the stiffness (for constant remaining
properties).
, i.e. the product of
the minimum radius of the bonded particles and the user-defined property radiusMultiplierBond.
With the default radiusMultiplierBond = 1 the beam that is located between two particles is a
cylinder with radius equal to the minimum radius of the two particles. The
radiusMultiplierBond allows to shrink (or grow) the beam that represents the
bond between these two particles. Clearly, a thicker beam will make the system
more stiff, while a thinner beam will decrease the stiffness (for constant remaining
properties).
If stressBreak off, the bond breaks when the particles detach from each other.
If stressBreak on, the bond breaks when the maximum bond normal stress
or the maximum bond tangential stress are reached, namely
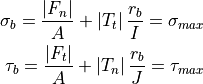
Note that “normal” and “tangential” always refer to the coordinate system local to the bond. Thus, these forces and torques need to be rotated along with the bonded pair of particles to compute the forces and torques in the global frame of reference.
Warning
Aspherix® will calculate a maximum bond length / contact distance from values for maxDistanceBond or the max. sigma/tau values which is used for defining the cut-off for the neighbor list build. For unrealistically high values, this might lead to a neighbor list overflow.
In order to stabilize the system a kind of energy dissipation is required. By default the model uses the approach as suggested by Potyondy and Cundall. Thus for each degree of freedom a damping force/torque is added that is defined, in case of the normal force, as

where  provides the direction of motion (normal or tangential relative
(angular) velocity). The damping coefficients and can be set
by the user-defined properties bondNormalDampingRatio and bondTangentialDampingRatio,
and they are defined as the ratio between the applied damping force and the critical
damping force. The critical normal damping force is defined as
provides the direction of motion (normal or tangential relative
(angular) velocity). The damping coefficients and can be set
by the user-defined properties bondNormalDampingRatio and bondTangentialDampingRatio,
and they are defined as the ratio between the applied damping force and the critical
damping force. The critical normal damping force is defined as  ,
where
,
where  is the equivalent mass.
is the equivalent mass.
By default bonds are created if two particles touch each other at the user-defined time-step tsCreateBond.
Plastic Dissipation Model
With the plasticDissipation switch, a model for plastic dissipation in the bond can be enabled, which will be outlined below. Primed variables always denote values updated in the current timestep, while non-primed variables are the respective values from the previous timestep.
Upon displacement of the particles, a change in force of

occurs.  here depends on the Young’s modulus or shear modulus
of the bond, for normal and tangential dissipation
respectively. Without any dissipation, the new total force exerted by
the bond is
here depends on the Young’s modulus or shear modulus
of the bond, for normal and tangential dissipation
respectively. Without any dissipation, the new total force exerted by
the bond is

and the stress is given by

with  being the bond area. The same holds for the
tangential stress
being the bond area. The same holds for the
tangential stress  .
.
With the dissipation model enabled, a fraction
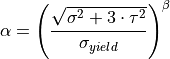
is dissipated before the forces/stresses are
updated. is the plastic yield stress of the
material, and is a parameter that controls the
saturation behaviour of the model.
The model tracks the amount of dissipated plastic energy,  ,
as follows:
,
as follows:

Note that  here is the magnitude of the total
displacement - normal and tangential combined.
here is the magnitude of the total
displacement - normal and tangential combined.
Once the dissipated plastic energy reaches a threshold level,
 , the bond is broken.
, the bond is broken.
Note
The bond is also broken if the distance between the particle
centers exceeds 
Note
stressBreak and plasticDissipation are mutually exclusive because their combination does not make sense from a physical standpoint.
Restrictions
None.
Coarse-graining information:
Using coarsegraining in combination with this command might lead to different dynamics or system state and thus to inconsistencies.
Default
stressBreak = off, plasticDissipation = off
Literature
[1} Potyondy, D. O., & Cundall, P. A. (2004). A bonded-particle model for rock. International journal of rock mechanics and mining sciences, 41(8), 1329-1364.