normal model adhesive_elasto_plastic
Purpose
This is a normal model with adhesion and elasto-plastic behaviour (often called Edinburgh model).
Syntax
model adhesive_elasto_plastic [other model_type/model_name pairs as described here ] settings keyword values
zero or more keyword/value pairs may be appended after the keyword settings (after all models are specified)
disableNormalWhenBonded values = 'on' or 'off' on = if the cohesion bond model is used, then the normal force is only added if the two particles are not bonded of = the normal force is always added if two particles overlap
Associated material properties
Material properties
youngsModulus( ): Young’s modulus of the material [pressure]
): Young’s modulus of the material [pressure]poissonsRatio( ): Poisson’s ratio of the material [–]
): Poisson’s ratio of the material [–]
Material interaction properties
coefficientRestitution( ): coefficient of restitution of the two materials [–]
): coefficient of restitution of the two materials [–]pullOffForce( ): constant pull of force (usually negative) [force]
): constant pull of force (usually negative) [force]adhesionEnergy( ): contact adhesion energy [energy/length^2]
): contact adhesion energy [energy/length^2]stiffnessRatio( ): ratio of
): ratio of  [–]
[–]springPowerValue( ): power value for loading and unloading springs [–]
): power value for loading and unloading springs [–]adhesionPowerValue( ): power value for adhesion branch [–]
): power value for adhesion branch [–]
Description
The adhesive elasto-plastic model consists of a hysteresis and a dissipative force, given by  and
and
 , respectively. The total normal force
, respectively. The total normal force  is obtained by the sum of the two components, i.e.
is obtained by the sum of the two components, i.e.

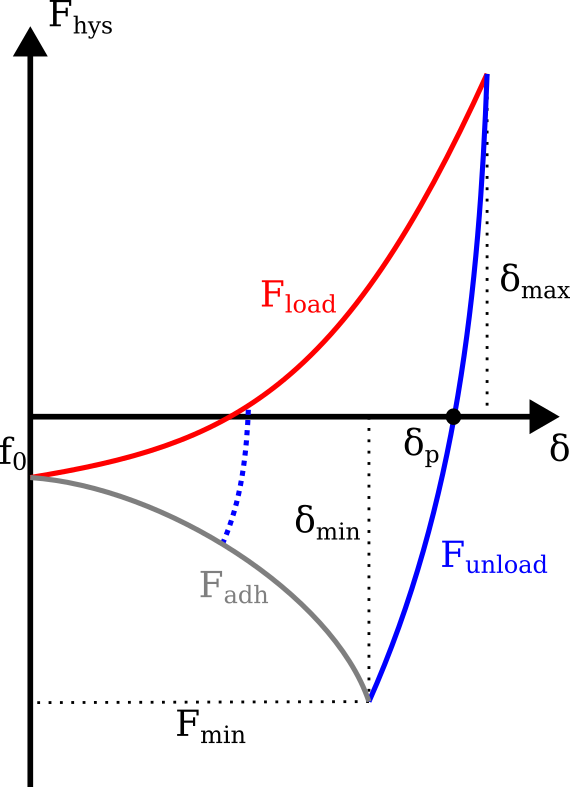
As ilustrated in the figure above, the hysteresis force involves three different branches,
 ,
,  and
and  , and it is obtained from the following conditional expressions:
, and it is obtained from the following conditional expressions:
Upon first contact a spring is loaded the component is

where is the constant pull of force defined by the user,
acting as an ever present force similarly to a van der Walls or electrostatic
adhesion force,  (with units force/length) is the spring stiffness
for the loading branch, which is a function of , the user defined
non-dimensional spring power value (see below) and
(with units force/length) is the spring stiffness
for the loading branch, which is a function of , the user defined
non-dimensional spring power value (see below) and  is the normal
overlap. The exponent was introduced to switch between a linear and
non-linear force-overlap relationship. This branch is indicated in red in the
graph above and it can only be traversed in the direction of increasing overlap.
The stiffness is given by
is the normal
overlap. The exponent was introduced to switch between a linear and
non-linear force-overlap relationship. This branch is indicated in red in the
graph above and it can only be traversed in the direction of increasing overlap.
The stiffness is given by
The definitions of the effective Young’s modulus  and effective particle radius
and effective particle radius  are identical to the ones from the Hertz model. Note that the
branch scales with
are identical to the ones from the Hertz model. Note that the
branch scales with  and therefore the (linear)
Hooke hysteresis (Luding) model and the (non-linear)
Hertz model can be reproduced by using
and therefore the (linear)
Hooke hysteresis (Luding) model and the (non-linear)
Hertz model can be reproduced by using  and
and  , respectively.
, respectively.
If the overlap decreases the model switches to the unloading branch (blue) with the unloading force which is given by

where  (with units force/length), is a non-dimensional
scaling factor defined by the user and
(with units force/length), is a non-dimensional
scaling factor defined by the user and  is the plastic overlap, whose definition
involves the maximum overlap
is the plastic overlap, whose definition
involves the maximum overlap  (see the figure above) as given by
(see the figure above) as given by
This branch can be traversed in both directions, i.e. if loading occurs after
some unloading the branch is climbed back until the previous maximum force is
reached and then the loading continues on the branch.
Finally, if the unloading continues and the hysteresis force would sink below
the minimum force  the adhesive unloading branch is followed.
The minimum force is given as
the adhesive unloading branch is followed.
The minimum force is given as
where is the adhesion energy parameter (set by the user) and  is
the radius of the contact circle. The latter is defined as
is
the radius of the contact circle. The latter is defined as

where is the non-dimensional adhesion power value parameter. The adhesive unloading
force, which scales with  , is defined as
, is defined as
This branch is only traversed in unloading direction. In case loading occurs while
on this branch the force will be switched to the  branch (as indicated
by the blue dotted line in the graph above). This requires resetting
to an appropriate value for continuity.
branch (as indicated
by the blue dotted line in the graph above). This requires resetting
to an appropriate value for continuity.
The dissipative damping force  depends on whether the linear ()
or non-linear (
depends on whether the linear ()
or non-linear ( ) model is chosen. In the linear case is given by
) model is chosen. In the linear case is given by

where  is the relative normal velocity and
is the relative normal velocity and
where is the coefficient of restitution.
The non-linear case defines the damping force as
and
The total normal force is then the sum of the hysteresis and dissipative force.
When any bond model, such as e.g. the cohesion model bond is used the disableNormalWhenBonded keyword can be used. If this parameter is set to ‘on’ then the normal model will only compute its contribution if the two neighboring particles do not have an active bond.
There is a corresponding tangential model available which can be found here.
Restrictions
If using SI units, youngsModulus must be > 5e6 If using CGS units, youngsModulus must be > 5e5
Default
disableNormalWhenBonded = ‘off’
(Morrissey) John P. Morrissey, Ph.D. Thesis, University of Edinburgh (2013)