normal model jkr
Syntax
model jkr [other model_type/model_name pairs as described here ] settings keyword values
zero or one keyword/value pairs may be appended after the keyword settings (after all models are specified)
tangential_damping values = 'on' or 'off' on = activates tangential damping off = no tangential damping disableNormalWhenBonded values = 'on' or 'off' on = if the cohesion bond model is used, then the normal force is only added if the two particles are not bonded of = the normal force is always added if two particles overlap
Associated material properties
Material properties
youngsModulus( ): The Youngs Modulus of a material, i.e. its stiffness [pressure]
): The Youngs Modulus of a material, i.e. its stiffness [pressure]poissonsRatio( ): The Poisson’s ratio, i.e. the ratio of transverse to axial strain [
): The Poisson’s ratio, i.e. the ratio of transverse to axial strain [ ]
]
Material interaction properties
coefficientRestitution( ): The coefficient of restitution of two materials []
): The coefficient of restitution of two materials []cohesionEnergySurfaceDensity( ): The (static) cohesive energy density between two materials [energy/length^5]
): The (static) cohesive energy density between two materials [energy/length^5]
Description
Warning
This is an simplified implementation of the JKR model. A better implementation is available with the jkr/general model model.
This granular model is the implementation of the model presented by Johnson et al. and further information in Israelachvili and Barthel. In particular it is a model for the normal contact of two cohesive spheres. The resulting force curve is an overlay of the original Hertz contact model with the attractive forces. Since in this model the attractive forces are closely linked to the repulsive model they cannot be separated into separate normal and cohesive models as usual (compare Section gran models).
This simplified model neglects non-contact forces. The governing equations are
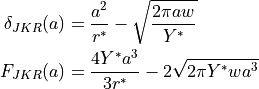
where  is radius of the contact area,
is radius of the contact area,  is the particle overlap,
is the particle overlap,  is the effective
Young’s modulus,
is the effective
Young’s modulus,  is the effective radius, and
is the effective radius, and  is the cohesion energy.
is the cohesion energy.
The cohesive component of this model is determined by the user input cohesionEnergyDensity. The relation between
this user input () and the cohesion energy () in equation above is given by the following
relation:

This formulation of the JKR model is only suitable for monodisperse packings; for polydisperse packings please use the jkr/general model.
Similar to the hertz model the tangential damping can be disabled by the keyword tangential_damping. Moreover, the calculation of the tangential force uses the original Hertz contact force (only pure contact force, no non-contact force) to fulfill Coulomb`s law correctly. For further details read the section tangential model.
As other normal contact models, also the JKR model is a spring-dash pot model. The coefficient for the force calculation depends on several material properties (please see section “Associated material properties” above).
When the cohesion model bond is used the disableNormalWhenBonded keyword can be used. If this parameter is set to ‘on’ then the normal model will only compute its contribution if the two neighboring particles do not have an active bond. If a bond breaks there will not be any force contribution from the interaction of the two particles that were previously bonded. Once the particles separate more than the region of influence of this model, the two particles will interact if they get within the sphere of influence again.
Restrictions
If using SI units, must be bigger than 5e6.
If using CGS units, must be bigger than 5e5.
Coarse-graining information
Using coarsegraining in combination with this command should lead to statistically equivalent dynamics and system state.
Default
tangential_damping = ‘on’, disableNormalWhenBonded = ‘off’
Literature
[1] K. Johnson, K. Kendall, A. Roberts, Proceedings of the Royal Society, 324, p 301-313 (1971)
[2] J. Israelachvili, Intermolecular and Surface Forces, (2011)
[3] E. Barthel, Journal of Physics D: Applied Physics, 41, (2008)