Convert between a quaternion and its Euler angles (and vice versa)
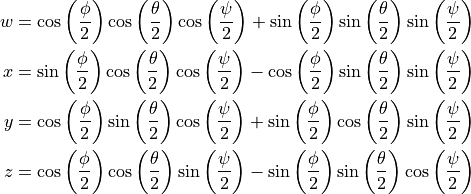
The quaternion values  can be computed from the ZYX Euler angles
can be computed from the ZYX Euler angles  :
:
or inversely the ZYX Euler angles (in radians) can be derived from the quaternion values :

There are several online tools to perform these conversion, see for example here.